
ūŅĮ³ė÷ĄĮ║▄ČÓūxš▀å¢╬„ķTūė200smart PLCĄ─▀\(y©┤n)äė(d©░ng)┐žųŲ╚ń║╬ū÷Ģ║═Ż╣”─▄Ż┐
▒Š┤╬ąĪŠÄīó═©▀^ŽÓī”Č©╬╗║═Į^ī”Č©╬╗Ą─ā╔ĘNĘĮĘ©ųvĮŌŻ¼ė╔ė┌ŽÓī”Č©╬╗Ģ■(hu©¼)ėą└█ėŗ(j©¼)š`▓ŅĪŻĢr(sh©¬)ķgįĮķLš`▓ŅĢ■(hu©¼)įĮ┤¾Ż¼īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųąŽÓī”Č©╬╗Ģ║═Ż╣”─▄▓╗īŹ(sh©¬)ė├Ż¼┐╔ęį┴╦ĮŌīW(xu©”)┴Ģ(x©¬)Ż¼īŹ(sh©¬)ļHæ¬(y©®ng)ė├ųąė├Į^ī”Č©╬╗Ģ■(hu©¼)Ė³ČÓŻ¼Į^ī”Č©╬╗Ģ■(hu©¼)ėąš`▓ŅŻ¼Ą½╩Ū▌^ąĪĪŻ
▒Š┤╬£yįćė├ĄĮŻ║
1.╬„ķTūė200SMART ST20Ą─PLC
2.└ū┘É▓Į▀M(j©¼n)ļŖÖC(j©®)║═ĮzŚUŲĮ┼_(t©ói)Ż¼╚ńłD1╦∙╩ŠĪŻ

łD1
ūóęŌŻ║ų╗ėąś╦(bi©Īo)£╩(zh©│n)ą═Š¦¾w╣▄▌ö│÷Ą─CPU▓┼ų¦│ų▀\(y©┤n)äė(d©░ng)┐žųŲ
1. ų„│╠ą“
š{(di©żo)ė├▌S│§╩╝╗»ųĖ┴Ņ║═š{(di©żo)ė├Į^ī”Č©╬╗ĪóŽÓī”Č©╬╗Ą─ūė│╠ą“

łD2
2. ŽÓī”Č©╬╗
ŽÓī”Č©╬╗Ą─ąĶę¬ėøõø▀\(y©┤n)ąąŪ░Ą─╬╗ų├Ż¼Ģ║═Ż║¾░č«ö(d©Īng)Ū░╬╗ų├║═▀\(y©┤n)ąąŪ░Ą─╬╗ų├▀M(j©¼n)ąą▀\(y©┤n)╦ŃŻ¼└^└m(x©┤)▀\(y©┤n)ąąĢr(sh©¬)░č╩ŻėÓŠÓļx┘xųĄĄĮGOTOųĖ┴ŅųąĄ─įO(sh©©)Č©╬╗ų├Ż¼Š▀¾w│╠ą“╚ńłD3Ī¬łD7╦∙╩ŠŻ¼│╠ą“ėąūóßīųvĮŌŻ¼▀@└’▓╗ū÷▀^ČÓĄ─ĮķĮBŻ¼ėąå¢Ņ}┐╔ęįį┌įušō┴¶čįĪŻ

łD3

łD4

łD5

łD6

łD7
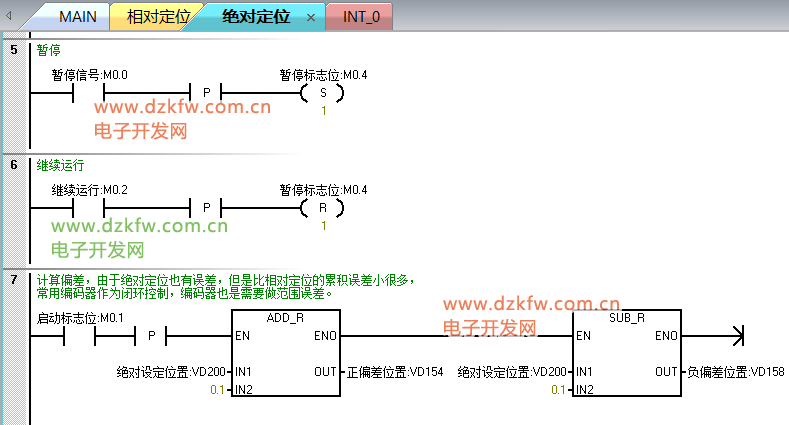
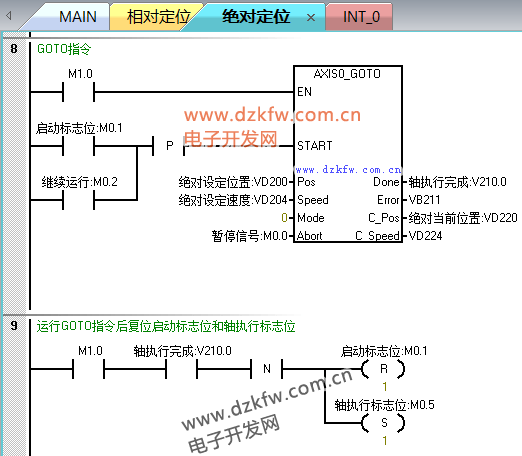
3. Į^ī”Č©╬╗
Į^ī”Č©╬╗Ą─╬╗ų├╩Ū╬©ę╗Ą─Ż¼Ģ║═Ż║¾└^└m(x©┤)ł╠(zh©¬)ąąGOTOųĖ┴Ņ╝┤┐╔Ż¼▓╗ąĶę¬║═ŽÓī”Č©╬╗─Ūśėėøõø╬╗ų├Ż¼▓óŪęĮ^ī”Č©╬╗š`▓Ņ▌^ąĪŻ¼Ė³▀m║Žæ¬(y©®ng)ė├ė┌═∙Å═(f©┤)▀\(y©┤n)äė(d©░ng)Ą─Č©╬╗┐žųŲŻ¼▓╗╚▌ęū«a(ch©Żn)╔·╠½┤¾Ą─š`▓ŅŻ¼Š▀¾w│╠ą“╚ńłD8Ī¬łD12╦∙╩ŠŻ¼│╠ą“ėąūóßīųvĮŌŻ¼▀@└’▓╗ū÷▀^ČÓĄ─ĮķĮBŻ¼ėąå¢Ņ}┐╔ęįį┌įušō┴¶čįĪŻ

łD8
łD9
łD10

łD11

łD12
ęį╔ŽŠ═╩Ūš¹éĆ(g©©)╬„ķTūėS7-200smart▀\(y©┤n)äė(d©░ng)┐žųŲĄ─Ģ║═Ż╣”─▄Ą─ĘĮĘ©Ż¼│╠ą“ųąø]ėąū÷═Żų╣Ż¼ąĶę¬═Żų╣Ą─╣”─▄┐╔ęįūį╝║äė(d©░ng)╩ų╠Ē╝ė▀@éĆ(g©©)╣”─▄Ż¼╬─š┬ā╚(n©©i)╚▌╚ńėąÕe(cu©░)š`šł┬ō(li©ón)ŽĄ╬ęéāĪŻ
ūóęŌŻ║┤╦│╠ą“āH╣®īW(xu©”)┴Ģ(x©¬)ģó┐╝ė├Ż¼æ¬(y©®ng)ė├ė┌īŹ(sh©¬)ļHæ¬(y©®ng)ė├ąĶꬹ▐Ė─▓ó£yįćĪŻ
ĖĮ╝■Ż║
200smartŠÄ│╠▄ø╝■Ż║
STEP 7-Micro/WIN SMART v2.5╗“š▀ęį╔Ž░µ▒Š
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū